Since its inception, Urbanloop has been working with STRMTG and Certifer to conduct analyses, audits, and compliance tests. Our capsules are equipped with three processors, dozens of redundant sensors, and thousands of calculations per second, ensuring positioning, fleet management, energy optimization, cybersecurity, and journey reliability.
Certification and safety
Safety at the heart of Urbanloop
Tens of thousands of passengers transported in real-world conditions
0 incidents, 0 accidents since launch
Certifer, the global leader in railway certification, has been Urbanloop's Approved Qualification Body since 2021.

Accessible and comfortable vehicles
The capsules are designed to ensure passenger safety and comfort: integrated lighting, tire suspension, smooth acceleration and braking (1 m/s², comparable to a tram), and easy communication with supervisors.
Our capsules meet accessibility standards: level platforms, wide doors, audible and visual signals.

Software and Cybersecurity
Maximum software intelligence, minimum mechanical complexity.
Urbanloop has developed a proprietary software system designed to meet the most demanding railway standards. Each capsule is equipped with an on-board CBTC system, with a safety controller that complies with railway standards. Their position is recalculated and validated 10 times per second: at each cycle, the capsule requests and obtains authorization to move forward, thus ensuring continuous safety.
Safety-related controllers compliant with
Railway standards (EN 50126, EN50128, EN 50129, EN 50159)
intelligent scheduler
Frequency adjustment to ensure capsule availability at stations.
Remote supervision
A single operator can control multiple Urbanloop networks.
Patented Urbanloop technology
Integrated signaling and communication, designed for safety.
Private, encrypted, and dedicated network
Secure communication between capsules, without external dependencies.
Simplified operation
Elimination of uncertainty, quick restart, streamlined daily procedures.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
The capsules
From 4 to 12 seats, quiet and battery-free.
Our capsules operate at a very low safety voltage (72V DC), ensuring robustness and safety in the face of temperature variations.
Urbanloop favors proven materials and uses components from the automotive industry.
The "4"
The height that lowers costs.
Ultra-compact capsule (L 1.20 m x H 1.80 m) designed for micro-tunnels, underground passages, and semi-open areas. Double door, fast flow, reduced construction costs.
The "8"
Efficient at peak times, economical during off-peak times.
4 seated + up to 4 standing at the front. 1.20 m wide, 2.30 m high. Maximum versatility, from industrial areas to park-and-ride facilities. Capacity up to 1,920 passengers per hour.
The "12"
The express train for large crowds.
12 places (4 seated + 8 standing), wide doors, fast exchanges. For high-traffic corridors, airports, and tourist sites. Up to 2,880 passengers per hour.
The tracks
Construction principle
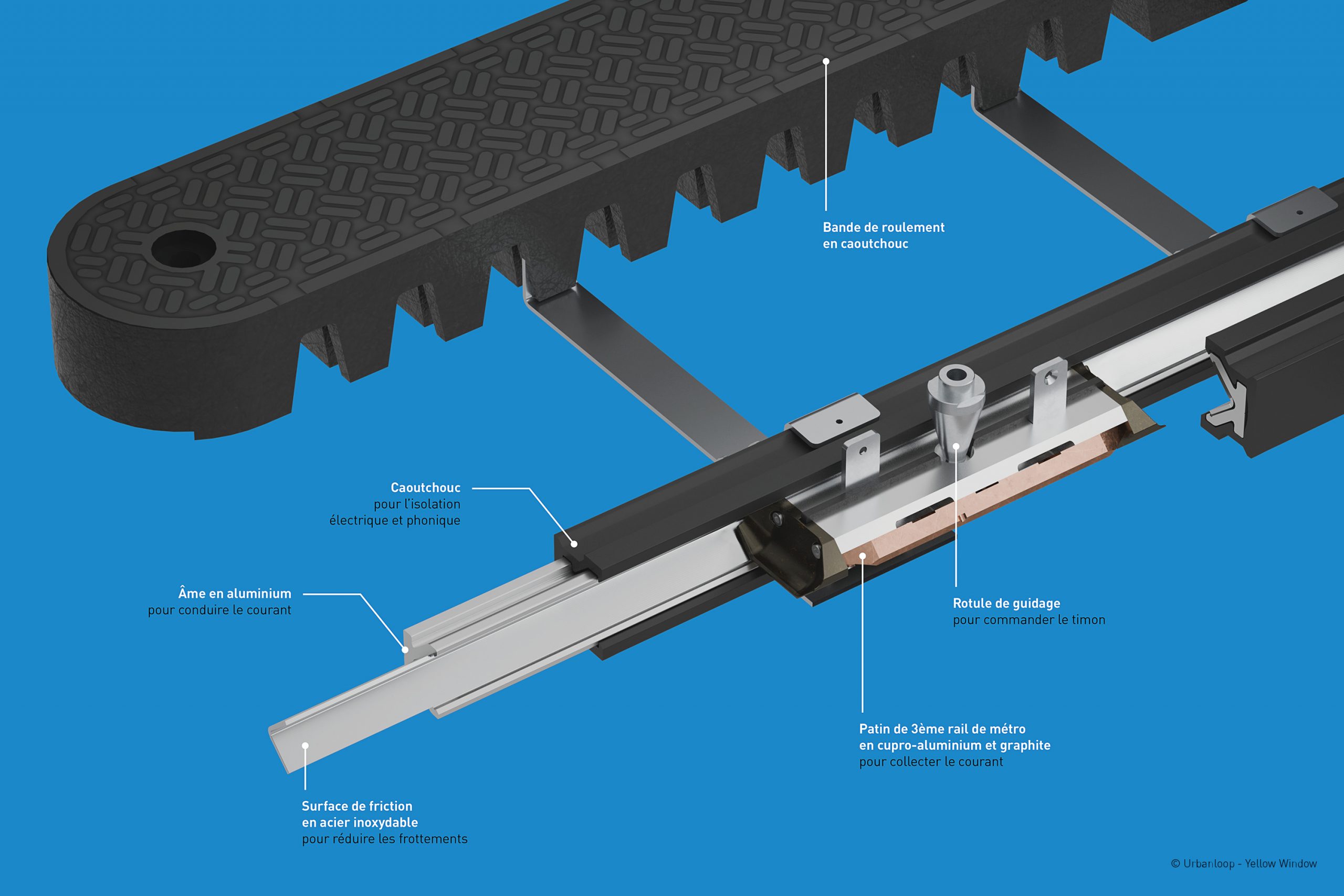
Urbanloop capsules are so light that they are reinventing guided transport.
They rest on two rubber treads that support the weight of the capsules. An electrified guide rail runs down the center of the tracks and carries electricity (72 V DC) to the capsule's third rail shoe.
In order to meet the specific requirements of each project, we offer several track installation methods that are compatible with all of our capsules.
The stations
The Urbanloop system adapts to all contexts thanks to a range of modular stations. Whether used as a branch line or a terminus, single or double, each configuration optimizes capacity, frequency, and traffic flow while maintaining commercial speed.
Urbanloop stations are also used to store and regulate capsules during operation. Each station can accommodate 2 to 6 capsules in each direction.
They are equipped with cameras, microphones, and intercoms, ensuring remote supervision and security. Fully automated, they require no operating personnel.

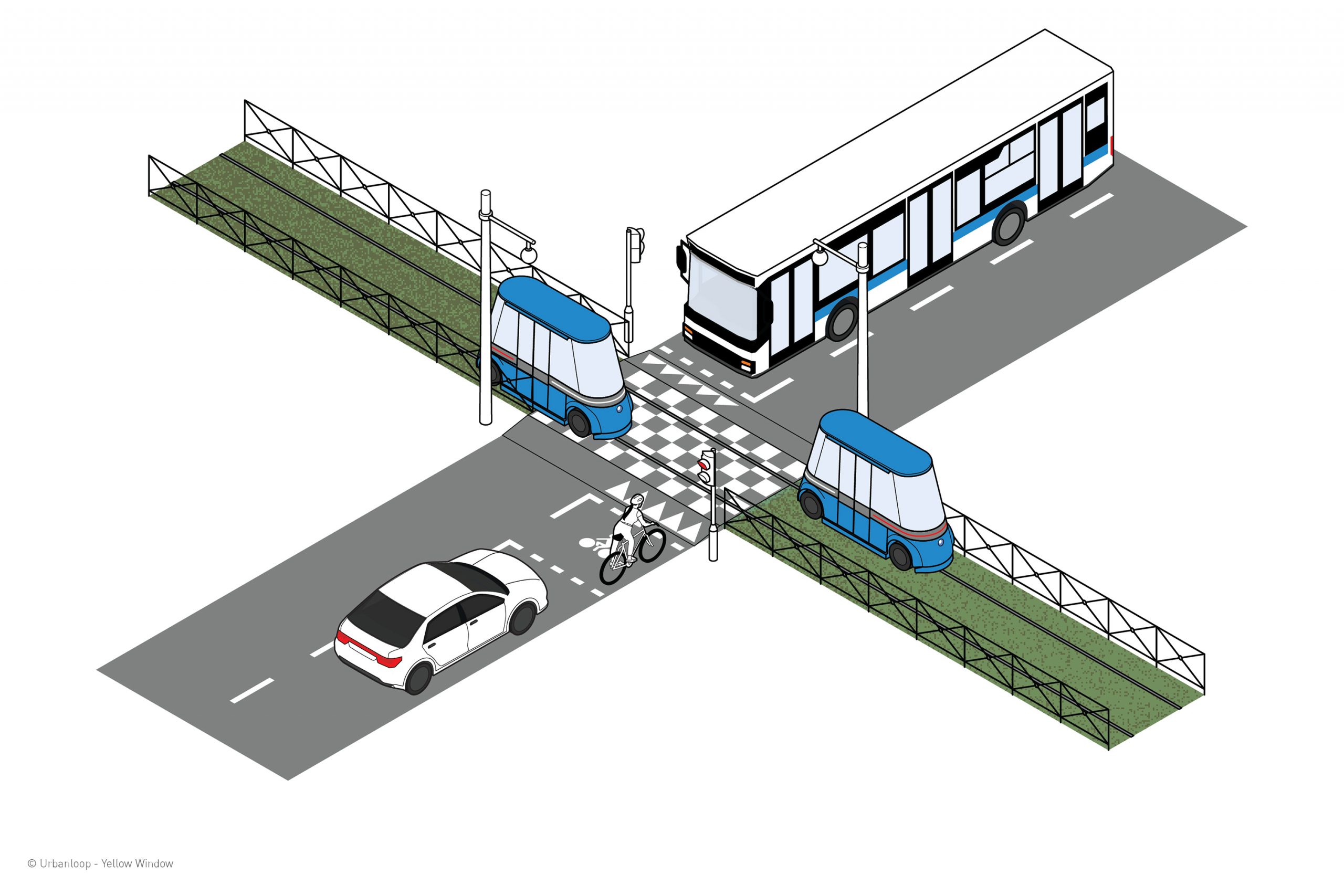
Intersections
The CROSS system: fixed sensors for increased speed and safety.
CROSS intersections complement the sensors embedded in the capsules and ensure safe coexistence with other road users.
Thanks to fixed cameras and sensors installed on poles, which monitor the area in real time, the capsules receive accurate information about the possible presence of vehicles or pedestrians. This means that when the road is clear, they can cross intersections much more quickly than when using only their on-board sensors, while maintaining maximum safety.
When the area is busy, the pod slows down in a coordinated and anticipatory manner; otherwise, it maintains its cruising speed to ensure smooth and continuous traffic flow.